| Group: AirborneWindEnergy |
Message: 21449 |
From: dave santos |
Date: 12/9/2016 |
| Subject: Re: Sky Serpent Array by Peter A. Sharp |
|
| Group: AirborneWindEnergy |
Message: 21450 |
From: Peter A. Sharp |
Date: 12/9/2016 |
| Subject: Re: Sky Serpent Array by Peter A. Sharp |
|
| Group: AirborneWindEnergy |
Message: 21451 |
From: dave santos |
Date: 12/9/2016 |
| Subject: Re: LTA Lifting Kite for Launch Assist |
|
| Group: AirborneWindEnergy |
Message: 21452 |
From: dave santos |
Date: 12/9/2016 |
| Subject: Re: Sky Serpent Array by Peter A. Sharp |
|
| Group: AirborneWindEnergy |
Message: 21453 |
From: Peter A. Sharp |
Date: 12/9/2016 |
| Subject: Re: Increasing elevation angle |
|
| Group: AirborneWindEnergy |
Message: 21454 |
From: dave santos |
Date: 12/9/2016 |
| Subject: Re: Increasing elevation angle |
|
| Group: AirborneWindEnergy |
Message: 21455 |
From: dave santos |
Date: 12/9/2016 |
| Subject: Re: Increasing elevation angle |
|
| Group: AirborneWindEnergy |
Message: 21456 |
From: Peter A. Sharp |
Date: 12/9/2016 |
| Subject: Re: Increasing elevation angle |
|
| Group: AirborneWindEnergy |
Message: 21457 |
From: dave santos |
Date: 12/9/2016 |
| Subject: AWE safety paradox |
|
| Group: AirborneWindEnergy |
Message: 21458 |
From: dave santos |
Date: 12/9/2016 |
| Subject: Re: Increasing elevation angle |
|
| Group: AirborneWindEnergy |
Message: 21459 |
From: joe_f_90032 |
Date: 12/9/2016 |
| Subject: Helium |
|
| Group: AirborneWindEnergy |
Message: 21460 |
From: dave santos |
Date: 12/9/2016 |
| Subject: eWind media coverage on its team and challenges |
|
| Group: AirborneWindEnergy |
Message: 21461 |
From: dave santos |
Date: 12/9/2016 |
| Subject: Re: eWind media coverage on its team and challenges |
|
| Group: AirborneWindEnergy |
Message: 21462 |
From: joe_f_90032 |
Date: 12/9/2016 |
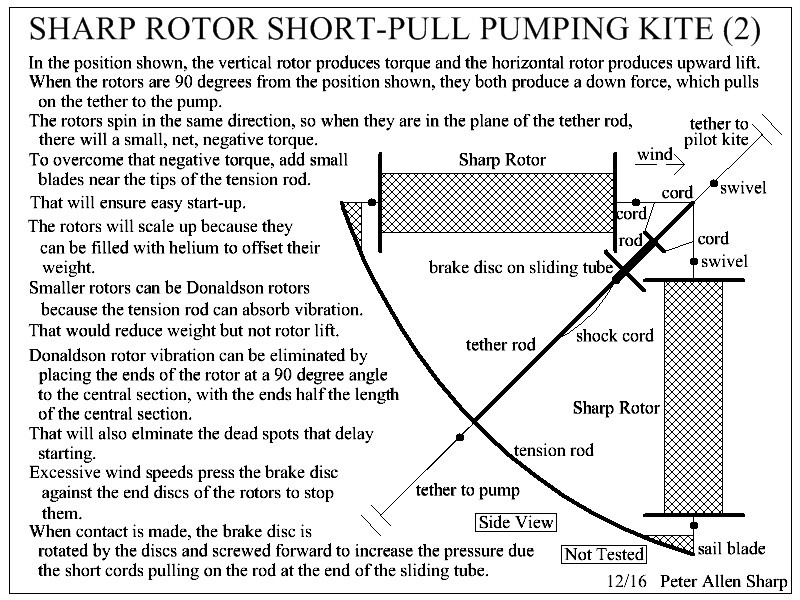
| Subject: Re: Sharp Rotor Pumping Kite |
|
| Group: AirborneWindEnergy |
Message: 21463 |
From: dave santos |
Date: 12/10/2016 |
| Subject: Indias Cinematographic Love Affair with the Kite (Patang) |
|
| Group: AirborneWindEnergy |
Message: 21464 |
From: joe_f_90032 |
Date: 12/10/2016 |
| Subject: Gyro kite Gyrokite |
|
| Group: AirborneWindEnergy |
Message: 21465 |
From: dave santos |
Date: 12/10/2016 |
| Subject: Re: Sharp Rotor Pumping Kite |
|
| Group: AirborneWindEnergy |
Message: 21466 |
From: dave santos |
Date: 12/11/2016 |
| Subject: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21467 |
From: dave santos |
Date: 12/11/2016 |
| Subject: Reviewing Mechanical Gearing Options for Groundgen Hardware Design |
|
| Group: AirborneWindEnergy |
Message: 21468 |
From: Pierre BENHAIEM |
Date: 12/11/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21469 |
From: Pierre BENHAIEM |
Date: 12/11/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21470 |
From: dave santos |
Date: 12/11/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21471 |
From: dave santos |
Date: 12/11/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21472 |
From: joe_f_90032 |
Date: 12/12/2016 |
| Subject: Re: Trends in Windless Kiting |
|
| Group: AirborneWindEnergy |
Message: 21473 |
From: snapscan_snapscan |
Date: 12/12/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21474 |
From: dave santos |
Date: 12/12/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21475 |
From: dave santos |
Date: 12/12/2016 |
| Subject: Re: Trends in Windless Kiting |
|
| Group: AirborneWindEnergy |
Message: 21476 |
From: joe_f_90032 |
Date: 12/12/2016 |
| Subject: Archimedes Screw Kite |
|
| Group: AirborneWindEnergy |
Message: 21477 |
From: joe_f_90032 |
Date: 12/12/2016 |
| Subject: Re: Trends in Windless Kiting |
|
| Group: AirborneWindEnergy |
Message: 21478 |
From: benhaiemp |
Date: 12/12/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21479 |
From: joe_f_90032 |
Date: 12/13/2016 |
| Subject: Re: Exploring AWES using multiple rotors in the kite system |
|
| Group: AirborneWindEnergy |
Message: 21480 |
From: dave santos |
Date: 12/13/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21481 |
From: dave santos |
Date: 12/13/2016 |
| Subject: Billion-dollar Breakthrough Energy Venture Fund formally launches, w |
|
| Group: AirborneWindEnergy |
Message: 21482 |
From: Peter A. Sharp |
Date: 12/13/2016 |
| Subject: Re: Sharp Rotor Pumping Kite |
|
| Group: AirborneWindEnergy |
Message: 21483 |
From: Peter A. Sharp |
Date: 12/13/2016 |
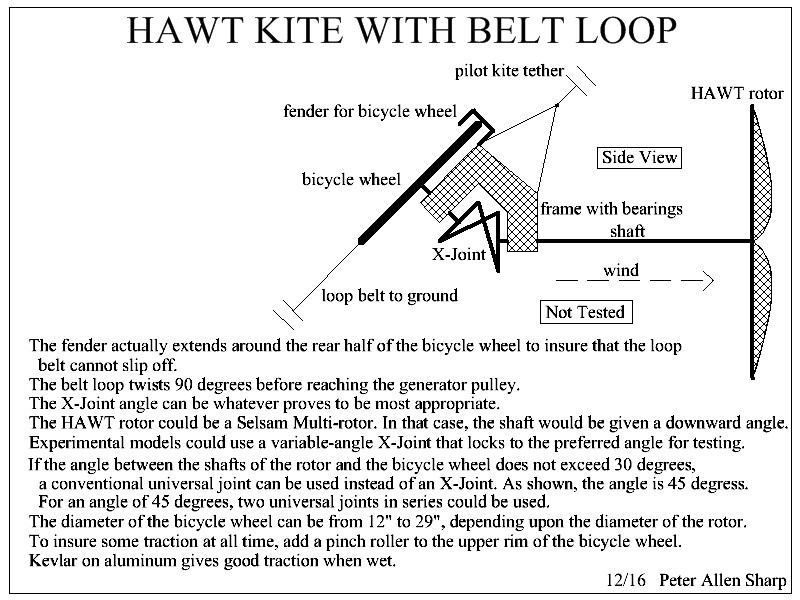
| Subject: HAWT Kite with Belt Loop |
|
| Group: AirborneWindEnergy |
Message: 21484 |
From: Pierre BENHAIEM |
Date: 12/13/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21485 |
From: joe_f_90032 |
Date: 12/13/2016 |
| Subject: Re: HAWT Kite with Belt Loop |
|
| Group: AirborneWindEnergy |
Message: 21486 |
From: dave santos |
Date: 12/13/2016 |
| Subject: Shell Oil, Eon, and Shlumberger team up to invest more in KPS |
|
| Group: AirborneWindEnergy |
Message: 21487 |
From: dave santos |
Date: 12/13/2016 |
| Subject: Re: Sharp Rotor Pumping Kite |
|
| Group: AirborneWindEnergy |
Message: 21488 |
From: dave santos |
Date: 12/13/2016 |
| Subject: Re: HAWT Kite with Belt Loop |
|
| Group: AirborneWindEnergy |
Message: 21489 |
From: dave santos |
Date: 12/13/2016 |
| Subject: New AWE players, EON and Schlumberger, background info |
|
| Group: AirborneWindEnergy |
Message: 21490 |
From: snapscan_snapscan |
Date: 12/13/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21491 |
From: joe_f_90032 |
Date: 12/13/2016 |
| Subject: Flag on a kite line Tutorial |
|
| Group: AirborneWindEnergy |
Message: 21492 |
From: joe_f_90032 |
Date: 12/13/2016 |
| Subject: Kite Line Anchor Tutorial |
|
| Group: AirborneWindEnergy |
Message: 21493 |
From: joe_f_90032 |
Date: 12/13/2016 |
| Subject: How to tie a line easily to any kite - with a pigtail |
|
| Group: AirborneWindEnergy |
Message: 21494 |
From: joe_f_90032 |
Date: 12/13/2016 |
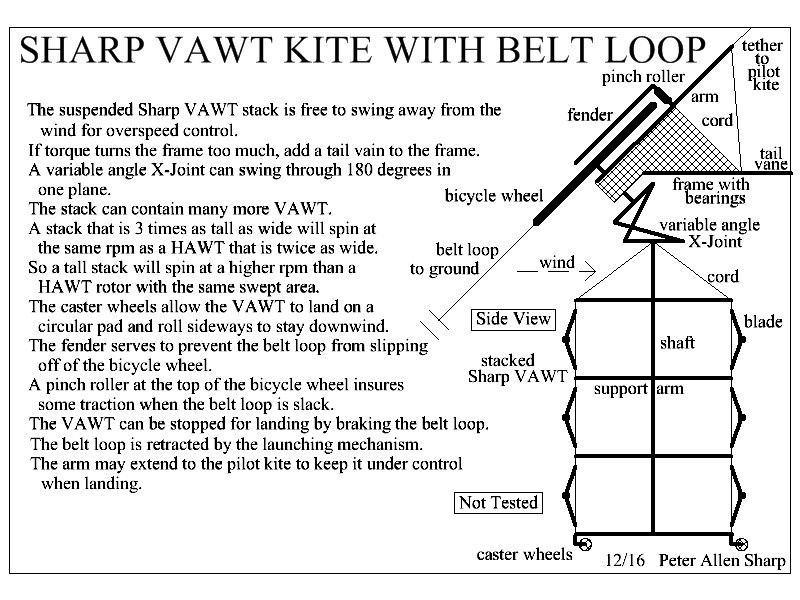
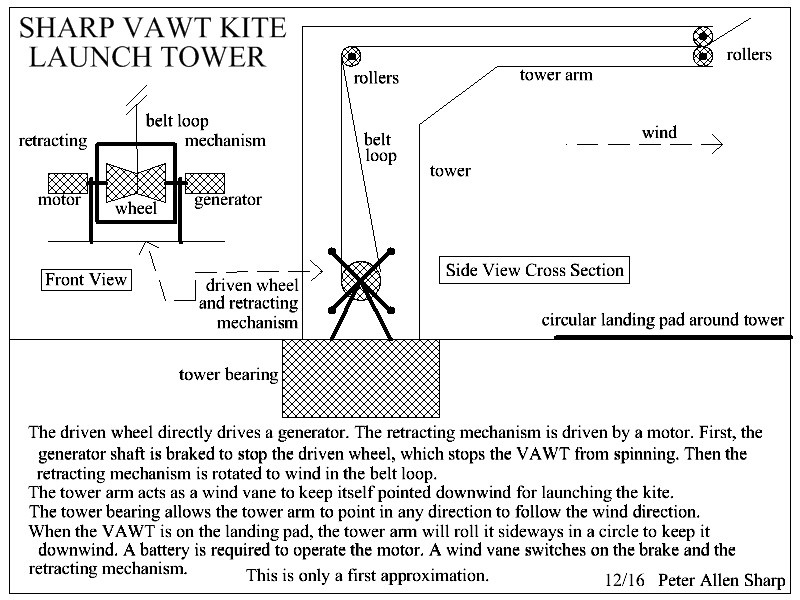
| Subject: Sharp VAWT Kite with Belt Loop; Sharp VAWT Kite Launch Tower |
|
| Group: AirborneWindEnergy |
Message: 21495 |
From: joe_f_90032 |
Date: 12/13/2016 |
| Subject: Re: Shell Oil, Eon, and Shlumberger team up to invest more in KPS |
|
| Group: AirborneWindEnergy |
Message: 21496 |
From: dave santos |
Date: 12/13/2016 |
| Subject: Re: Christof Beaupoil's latest AWES experiments |
|
| Group: AirborneWindEnergy |
Message: 21497 |
From: joe_f_90032 |
Date: 12/13/2016 |
| Subject: Sheathed torque cables. Flexible shafts with casing |
|
| Group: AirborneWindEnergy |
Message: 21498 |
From: joe_f_90032 |
Date: 12/13/2016 |
| Subject: Re: Sheathed torque cables. Flexible shafts with casing |
|














{kind=link}