Hi DaveS,
“The
Sharp-Rotor Arch Kite unit-WECS is closest in previous design to
Magenn's AWES. The differences are in the number of "bucket" vanes and
the Sharp arrangement as an arch array.”
Not
true. The Magenn is a buoyant Savonius rotor. The Sharp Rotor is a
variation of the two-sided Donaldson rotor. The difference in the
number of “buckets” is critical. A four sided Sharp Rotor does not
auto-rotate, so it does not create lift by rotating itself. We don’t
know if the Magenn produces lift due to the Kramer effect. A few years
ago, I told Magenn about the Sharp Rotor and why they should use 3
surfaces, but they did not reply. However, they seem to have moved
toward 3 surfaces. I would like to see their test results, if any, on
this design.
http://comcollab.com/featured-magenn.html
“As
usual, the open challenges are in lifting gas economics and operations,
and the high parasitic cycle-drag of a cross-axis rotor's upwind-moving
side in headwind.”
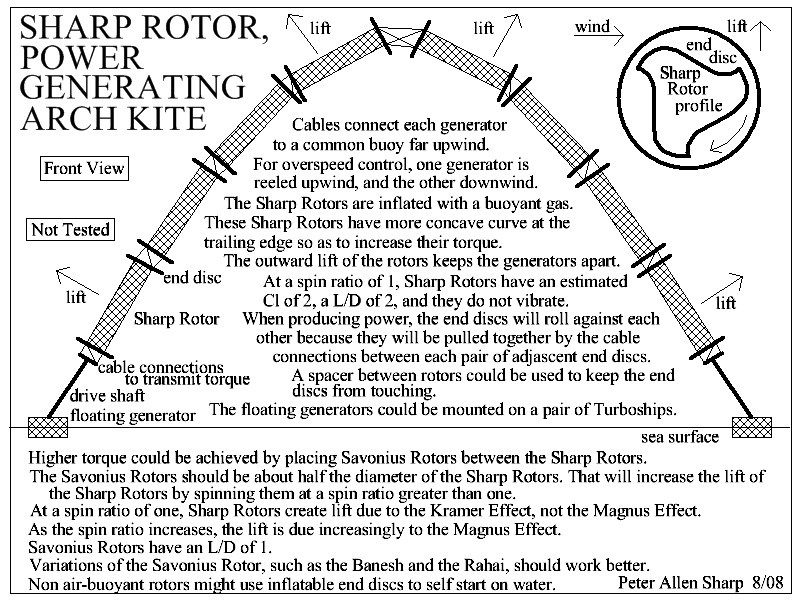
The
Sharp Rotor can be made to be self-launching from the surface of the
water by using small pontoons on legs that do not rotate with the
rotor. Once one or two rotors are creating lift, they can begin to lift
the next rotor, which creates additional lift, and so on, until the
entire arch is in the air. So a buoyant gas is not a necessity for a
Sharp Rotor Arch Kite to self-launch. But if hydrogen containment can
be perfected, then it would make sense to use it. Turning a Sharp Rotor
sideways to the wind eliminates lift, and that is why I use that
technique for overspeed control for the arch kite. The arch would
become a almost a straight line, extending mostly downwind, flying a
little above the sea surface. But testing and refinements would be
necessary.
I
have a variant of the Sharp Cycloturbine that can operate on its side,
so it could be used between Sharp Rotors to greatly increase the torque
of an Arch Kite. Part of the power from the Sharp Cycloturbines could
be used to spin the Sharp Rotors at a spin ratio greater than 1 so as
to greatly increase their lift. That is because a Sharp Cycloturbine
normally spins at a spin-ratio (tip speed ratio) of 3 to 3.5.
The
amount of lift created by the Sharp Rotors of an Arch Kite can be
increased by using a wider arch, proportionally, so that the rotors are
more horizontal. But if they are being used to create torque, then they
need only create enough lift to support themselves, or reasonably close
to it. If they are buoyant, then the angle is irrelevant. If the rotors
are spun at a spin-ratio greater than one by using Sharp Cycloturbines,
then their lift will be much greater, and their angle can be more
vertical while still supporting themselves.
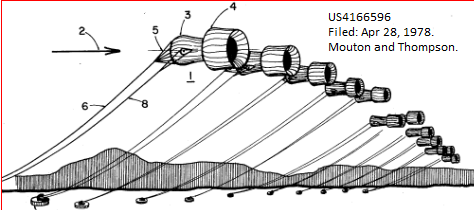
“Note
the geometric and dynamic similarities with Aerology Lab's SkyBow,
which could be held up in lulls by a single aerostat at the center. The
SkyBow ends operate as Archimedes' screws, while the Sharp rotor loses
rotation off-axis at the ends, unless it adopts handed helical vanes.
The Skybow's center tumbles in tight orbits as a DS wing, while the
Sharp rotor is a Savonius refinement.”
Please
note that the Sharp Rotor Arch Kite orients to the wind automatically,
so there is no need for it to operate “off-axis at the ends”. The Sharp
Rotor is not a Savonius refinement. It is a Donaldson rotor variation.
Turning the Sharp Rotor sideways to the wind can be used for overspeed
control.
“Have
been unable to find documentation of the "Kramer Effect" yet. Maybe
PeterS can help with a definitive link. We have tended to see a Magnus
Effect along a continuum from smooth Flettner rotors to textured rotor
variants (like the stitches on a curving baseball).”
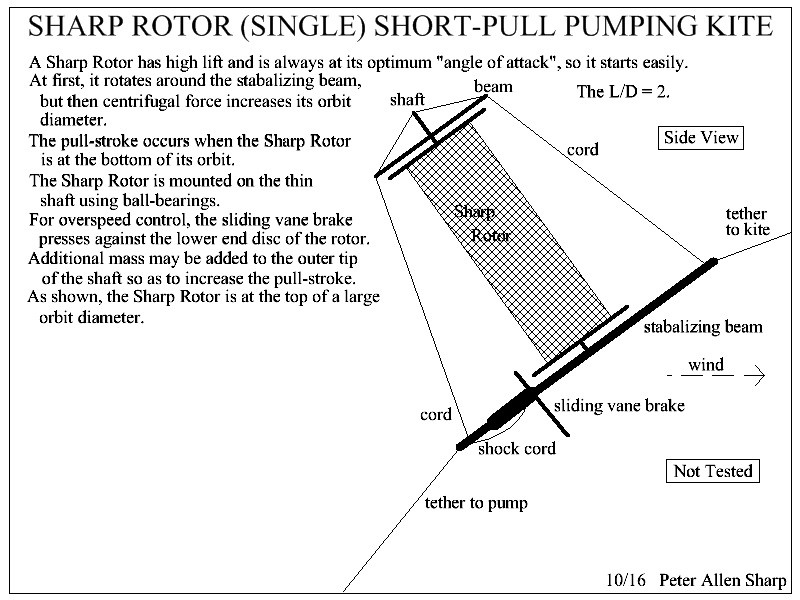
I
have explained the Kramer effect previously. It’s a simple concept, but
the aerodynamics can become very complex. It refers to when a wing is
rapidly increasing its angle of attack. Stall will be delayed to a much
higher angle of attack. In the case of the Sharp Rotor, stall seems to
be delayed so much that there is no stall. The evidence for that is
that there is no vibration. In contrast, a two-sided Donaldson rotor
does stall and vibrates strongly as a result. In fact, as JoeF has
shown, the vibration is so strong that it can be used for short-pull
pumping.
The Kramer
effect is well known to aerodynamicists and it occurs in many different
situations, even insect wings. There are thousands of references to it.
I did a Google search and found a great many. I searched for “Kramer
effect delayed stall”. If you find one that you believe is definitive,
please let us know.
As
I previously explained, in the case of the Sharp Rotor, the Kramer
effect and the Magnus effect smoothly overlap. If the Sharp Rotor is
spun using external power so that the spin ratio exceeds 1, then the
Magnus effect will begin to increase. But at a spin ratio of 1 -- which
is the self-spinning spin ratio of the Sharp Rotor -- the Magnus effect
contributes almost no lift. The Sharp Rotor can create extreme lift by
using the Magnus effect, but a little more power is required to spin it
at a high spin ratio, as compared to a cylinder (Flettner rotor). In
contrast, a Donaldson rotor requires a huge increase in power to
produce Magnus effect lift because the rotor acts like a centrifugal
air pump, so it is not practical to create Magnus effect lift with a
Donaldson rotor.
The
Sharp Rotor has a unique combination of favorable characteristics, with
the result that it can be used to create new kinds of kites. When
focusing on similarities, it is important to also focus on the
differences, lest they be overlooked. In my experience, neglecting
differences leads to accepting false similarities as true similarities.